Robotics-Related研究
多指爬管机器人
 资助:美国国家科学基金会研究基金
资助:美国国家科学基金会研究基金
UG学生:P. 豪,K. Mihaylov J. 马丁,P. 阮和H. 阮
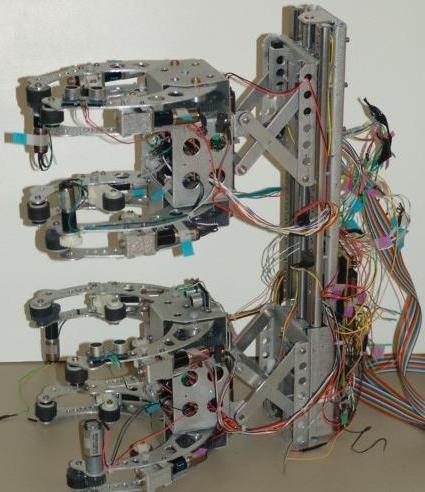
这个机器人能够爬上爬下直径从2英寸到6英寸的管道 执行检查任务. 这种独特的设计使机器人能够克服障碍 管道,如管件、法兰和连接处. 它包含29个马达,36个齿轮, 14个滚轮,4个微控制器,4个超声波传感器,2个触摸开关. 所有的手指 是弯曲的形状(难以制造). 该项目获得了最佳技术含量 获奖及1st 在2010年ASME地区学生竞赛中获得第一名.
滚管攀爬机器人
 资助:美国国家科学基金会研究基金
资助:美国国家科学基金会研究基金
UG的学生: L. 去,K. 常,C. 大卫和J. P. 米娜
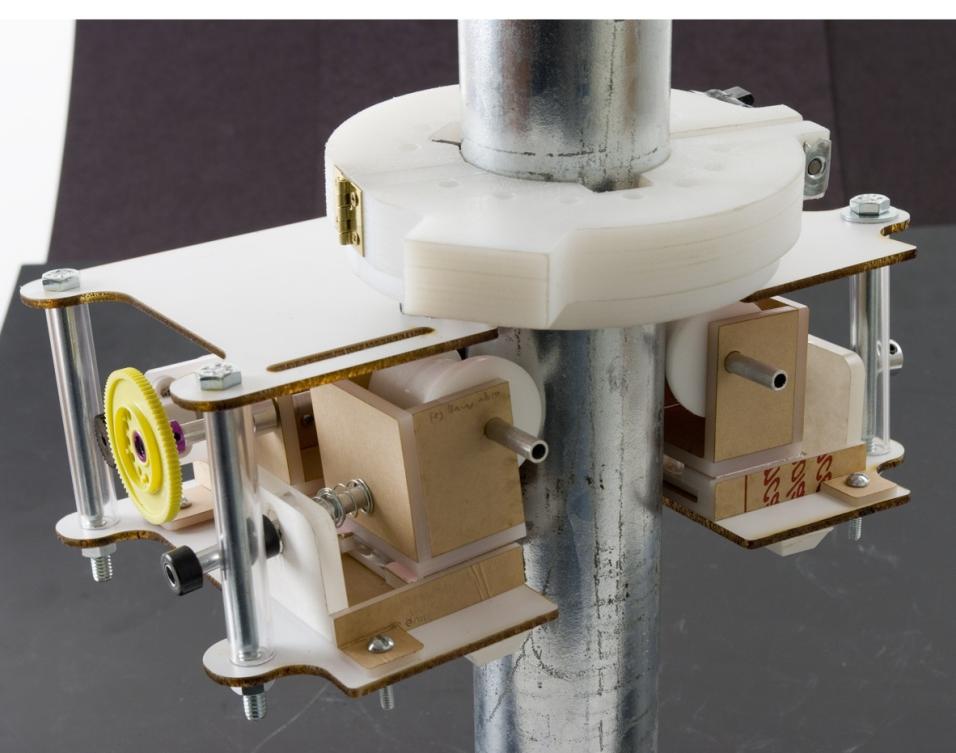
该机器人系统可以执行小型和垂直管道的自动检测 管道. 到目前为止,还没有人成功制造出能够爬上如此小的管道的机器人 垂直. 该系统采用新颖的攀爬和旋转机构,使机器人 不仅能“抢”到管子,还能爬上管子,绕着管子旋转. 这样可以检查管道上的所有区域. 这个项目获得了2nd 在2009年ASME地区学生海报比赛中获得第一名.
电力线攀爬机器人除冰
赞助商:Joby Energy (Santa Cruz, CA)
研究生: J. K. Gibb一个y
为了发电,机载风力涡轮机必须用一根长长的绳子拴在地面上 电缆. 这条电缆很容易形成冰沿着它的长度从 寒冷潮湿的空气存在于冬季的云层中. 这个移动机器人能够爬上这条线 然后把冰去掉. 建立了样机并进行了测试,并对控制方法进行了研究 (由于保密原因,此处不展示真实图片).
外周插入中心导管插入系统
赞助商:VasoNova, Inc.,(加州森尼维尔)
UG的学生: J. Fung) N. D. 范教授
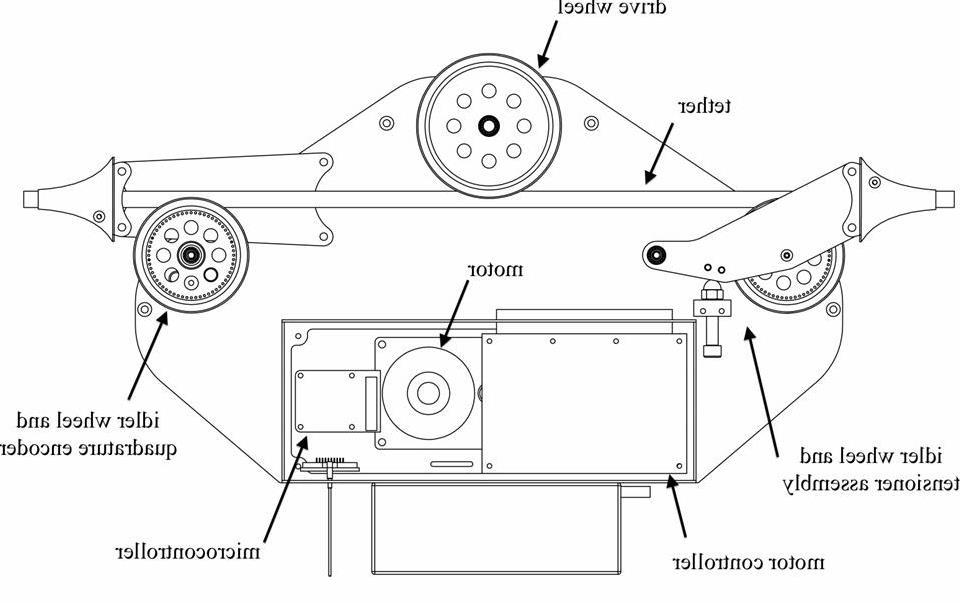
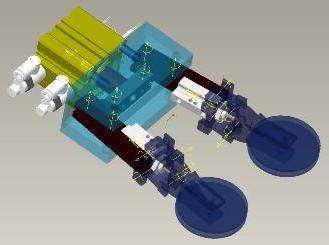
 我们开发的装置可以在两个被压缩的轮子之间插入导管
通过摩擦力和弹力. 一个轮子由微型电动机驱动. 的
电机编码器将旋转信息输出到ATmega微控制器,其中
数据可转换成线性距离,由液晶屏显示.
经过多次测试,系统的精度略有偏移,误差也有所减小
是否因编码和电源处理而被识别.
我们开发的装置可以在两个被压缩的轮子之间插入导管
通过摩擦力和弹力. 一个轮子由微型电动机驱动. 的
电机编码器将旋转信息输出到ATmega微控制器,其中
数据可转换成线性距离,由液晶屏显示.
经过多次测试,系统的精度略有偏移,误差也有所减小
是否因编码和电源处理而被识别.
用于野火探测与追踪的航空机器人传感器网络
 主办单位:美国机械工程师协会硅谷分会
主办单位:美国机械工程师协会硅谷分会
UG学生: J. 下巴,E. 杜罗T. 阮,年代. 杨,我. Ma
这个飞行机器人被设计用来探测野火并预测其进展 传感器(CO, CO2(温度、湿度). 然后一群这样的机器人将随之发展 采用无线通信技术建立消防员移动传感器网络 保护.
用于主动视频会议、检查和社交的网真漫游车(TRAVIS)
 UG学生: E. Stackpole G. 巴克和S. Hu
UG学生: E. Stackpole G. 巴克和S. Hu
这个项目开发了一种低成本、远程操作、独立的交互式远程呈现 漫游车,可以在室内和室外漫游,进行主动视频会议,检查和 通过互联网进行社交. 漫游车由两个差速驱动轮操纵 由两个电机驱动(由Arduino微控制器控制). 一个额外的施法者 轮子防止漫游者摔倒. 为用户提供逼真、身临其境的体验 “月球车”的设计高度为160厘米,具有“真人大小”的视觉体验 它模仿一个人——头部、颈部和躯干安装在基座上. HP高级自动对焦 网络摄像头、利力浦特触摸屏LCD和Nano-ITX主板提供面对面的服务 用户间通信. 基于Adobe Flash的界面允许用户操作 机器人可以从任何一台有浏览器和互联网连接的电脑上运行. 总成本 特拉维斯的价格低于1000美元. 该项目获得2009年ASME区域学生竞赛最佳技术含量奖.
机器人材料艺术训练师
 研究生: Thang中方
研究生: Thang中方
这个项目的重点是创造一个9自由度的机器人训练师,可以反击创造 逼真的战斗模拟. Pro Fu的主要组成部分是两条可以执行任务的手臂 攻击和躯干的组合,可以在每个方向扭曲30°. 气动 气缸用于移动连杆机构,需要采用紧凑的设计 3自由度进入肩部. 该项目包括一个设计阶段,其中概念 形成骨架、柱体计算和分析.
用于机器人手术的工具夹手
 研究生: James 阮
研究生: James 阮
本课题的重点是为医疗机器人设计一个抓手. 夹持器被激活 气动法. 力传感器安装在抓手上进行触觉感应. 完成夹持器装配后,操作夹持器进行手术夹持 ,并测量了输出电压,得到了力与的关系 电压.
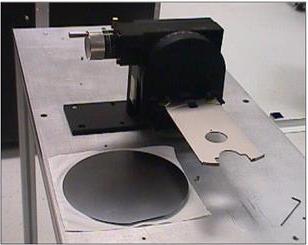
高速晶圆车
 赞助单位:应用材料公司(加州圣克拉拉)
赞助单位:应用材料公司(加州圣克拉拉)
研究生:陈雷
这个项目是开发一个300毫米的晶圆载体,可以伴随高机器人 速度不牺牲当前晶圆放置精度和颗粒性能. 这个项目的额外要求是航母需要维持在 至少有3000C在稳态温度下持续至少10秒. 这个项目 从深口袋、弹性体、机器人腕夹等多个概念开始 对于晶圆载体,通过实验. 其中一个概念已经投入生产 通过内部测试和现场认证后放行.
血细胞计数器Autosampler
 赞助方:Stratedigm Inc. (加州圣何塞)
赞助方:Stratedigm Inc. (加州圣何塞)
UG的学生: R. Y. 陈,M. K. 黄,和H. 叫喊声
试管自动进样器是Stratedigm第一代Flow的装载机组件 血细胞计数器. 这个项目设计了一个可以存储至少160个试管的系统 并保持测试样品温度为8°C. 该系统还可以输送试管 从存储区到细胞仪输入针,混合测试样品,扫描试管 条形码标签.
Synaptic自动触摸板测试仪的热室门设计
 赞助商:Synaptics Inc. (加州圣克拉拉)
赞助商:Synaptics Inc. (加州圣克拉拉)
UG学生: J. 海耶斯和K. 梁
Synaptics开发了各种触控板. 本项目是设计和制造一种热 用于Synaptics的新触摸板测试仪的室门,并使用控制触摸板加载器 一个电机和计算机程序. 该测试仪可容纳三个样品在一个室下 不同的温度和湿度. 对舱门的最终原型进行了测试 在极端条件下,达到了所有触控板测试要求.
出版物
书
杜,Winncy (2014), 电阻式、电容式、电感式和磁性传感器技术,泰勒 & Francis Groups, ISBN-13: 978-1439812440; ISBN-10: 1439812446.
杜,Winncy 和Scott Yelich(2008),“震后管道泄漏检测技术”, 第九部分, 智能传感器与传感技术,斯普林格出版社,页. 265-283. ISBN-13: 978-3540795896; ISBN-10: 3540795898.
杜,Winncy 斯科特·叶利奇,(2012)第2章. 基于电阻和电容的传感技术; 现代传感器,传感器和传感器网络国际频率传感器协会(IFSA)出版,ISBN-13: 978-8461596133; ISBN-10: 8461596137.
专利申请
共同发明人的两个独特的攀爬机器人设计的管道检查. 这些机器人 设计是通过美国国家科学基金会拨款开发的,专利申请必须得到处理 透过大学基金. 其中一项设计于1999年提交给基金会 于2009年6月申请,目前正处于批准和准备过程中.S. 专利 应用程序. 第二个设计的描述正在定稿中,准备提交给 大学基金会申请专利.
精选期刊/同行评议会议论文
杜,WinncyJose, Winston,《lol菠菜网正规平台》 传感器,” 传感器 & 传感器杂志,卷. 120,第9期,2010年9月,页. 1-11.
H. Myeong Y. H. Yoon N. J. 查, 杜,WinncyD。. H. Kim,“基于Android操作系统的教育机器人的用户跟踪” 基于机器人平台,”in Proc.of 2012年IEEE第九届泛在机器人与环境智能国际会议11月. 26-29, 2012,大田,韩国,pp.132-135.
阿斯克兰,杰克和 杜,Winncy数字图像的快速精确凸、凹曲率及其应用 寻路”,提交给 计算几何学报:理论与应用,论文编号:707,2014.
杜,Winncy, 阮, Hai; Scallion, Kevin; and Dutt, Amitesh, “Design of a GMR 传感器 Array System 机器人管道检测.” 诉讼 of 2010 IEEE传感器大会11月. 1-4,
杜,Winncy 和Yelich, Scott,“基于电阻和电容的传感技术”, 传感器 & 传感器日报》 卷. 90,特刊,2008年4月,页. 100-116.
杜,Winncy,“通用零件给料机(UPF)的建模与控制”, 机械工程学报,卷. 18, No. 3, 2005, pp. 317-320.
杜,Winncy“混合学习方法在机电工程中的应用”, 世界工程技术教育汇刊,卷. 2, No. 1, 2003, pp. 69-72.
Stackpole, Eric; Barker, Gregory; and 杜,Winncy“用于主动视频会议的低成本、远程操作、交互式网真漫游车,” 检查和社交(TRAVIS),提交给 机器人与自动化国际会议 (ICRA 2015),论文随附.
杜,Winncy 郭,Gary,“管道泄漏三种传感器技术的实验比较” 检测。” 学报 2009 美国国家科学基金会工程研究与创新会议, 2009年6月22-25日,夏威夷,火奴鲁鲁,论文索引号0619157.
郭,加里和 杜,Winncy“建筑物的公用管道” & 他们的震后破坏检测,” NEES学报th 年度会议, 2008年6月18日至20日,波特兰,俄勒冈,页. 1-6.
杜,Winncy 和Yelich, Scott,“电阻传感器:原理、设计和应用”, 第二届国际传感技术会议论文集11月. 26-28, 2007, Palmerston North,新西兰,pp. 326-331.
杜,Winncy 和Yelich, Scott,“电容式传感器:原理、设计和应用”, 第二届国际传感技术会议论文集11月. 26-28, 2007, Palmerston North,新西兰,pp. 332-337.
McMullin K., 杜,Winncy, l, T, Stojadinovic, B.Rai, K. (2007). 漂移敏感的实验测试 非结构系统-第1年.程序- 5th 年度会议. NEES年会,雪鸟村,犹他州,6月18-21日.
杜,Winncy 和Yelich, Scott,“生物机电:新兴技术、应用和挑战”, 第三届自主机器人与代理国际会议论文集(ICARA)12月. 12-14, 2006,帕默斯顿北部,新西兰,pp. 129-134.
杜,Winncy冈萨雷斯,M.,“二维实时卡尔曼滤波器的设计与实现” 使用EVS控制试验台 学报 的 IEEE/ASME先进智能机电一体化国际会议, 2005年7月24-28日,蒙特利,加州,页. 1453-1458.
冈萨雷斯,M., 杜,Winncy,“将外部视觉系统集成到2D航天器反馈试验台” 控制。” 学报 的 IEEE/ASME先进智能机电一体化国际会议, 2005年7月24-28日,蒙特利,加州,页. 213-218.
杜,Winncy弗曼·B.纽约州莫托斯(Mourtos).《lol菠菜网正规平台》, 第八届UICEE工程教育年会2月. 7-11, 2005年,金斯顿,牙买加,pp. 331-336.
杜,Winncy《菠菜网lol正规平台》, 2005年美国机械工程师协会国际机械工程大会论文集 & 博览会11月11日,佛罗里达州奥兰多. 5-11, 2005, CD程序:IMECE2005-82968).
拉米雷斯,H., 杜,Winncy、“建模 & NiTi形状记忆合金致动器的控制 学报 国际自动控制联合会9月. 6-8, 2004,悉尼,澳大利亚,页. 457-462.
杜,Winncy,“面向机器人教育的模块化机器人装配套件的开发”, 第十一届世界机械与机械科学大会(IFToMM 2003), 2003年8月18日至21日,中国天津.
肯尼·琼斯.杜温妮,“医疗按摩机器人的开发”, 法庭程序 IEEE/ASME先进智能机电一体化国际会议, 2003年7月23-26日,日本神户,页. 1096-1101.
杜,Winncy“为有效的学生学习设计适当的课程项目”, 国际自动化控制联合会学报,伯克利,加州,12月. 9-11, 2002, pp. 685-690.
杜,Winncy“透过整合适当的研究活动,达致优质教与学” "机电一体化教育" 2002年ASME国际机械工程大会论文集 & 博览会11月11日,新奥尔良. 17-22, 2002 (CD程序:IMECE2002-39471).
杜,Winncy,“无损缺陷检测技术综述”, 学报 美韩智能基础设施系统研讨会8月11日,韩国釜山. 23-24, 2002, pp. 291-299.
孔德蒙., 杜,Winncy,“老年人和残疾人护理机器人的研制”, 第八届机电一体化论坛国际会议论文集, 2002年6月24日至26日,恩斯赫德,荷兰,页. 794-800.
杜,Winncy,“振动给料机上零件的运动跟踪”, 学报 2001 IEEE/ASME先进智能机电一体化国际会议, 2001年7月8-11日,意大利,Como, pp. 75-80.
杜,WinncyStephen L . Dickerson.,《lol菠菜网正规平台》 板”, 第七届机电一体化论坛国际会议论文集, 2000年9月6日至8日,乔治亚州亚特兰大. (CD程序:作者索引-杜)
杜,WinncyStephen L . Dickerson.,“一种新型振动给料机的建模与控制”, 学报 IEEE/ASME先进智能机电一体化国际会议, 9月. 1999年,亚特兰大,乔治亚州,第19-23页. 496-501.
杜,WinncyStephen L . Dickerson.,“基于改进PWM信号的一维振动给料机控制”, 第八届智能系统国际会议, 1999年6月24-26日,科罗拉多州丹佛市,pp. 82-87.
杜,WinncyStephen L . Dickerson.,“使用机器视觉的被动部件检测”, 学报 国际多芯片模块与高密度封装会议及展览会 1998年4月15日至17日,科罗拉多州丹佛,页. 74-79.
斯蒂芬·迪克森., 杜,Winncy和卷cy, Jerry,“过程监控和反馈的集成视觉单元” 电子组装”, 电子封装中的传感器-研讨会,ASME国际机械工程 大会和博览会11月., 1995,旧金山,加州,卷. 14, pp. 73-78.
影片及连结
1. 波士顿科学公司的自动导管装配
2. Dr. 上海大学杜同学将机器人技术推向新高度
3. 采用创新粘接方法收集卫星碎片